

GTS、GSN等固高运动控制器回零有两种方式实现,第一是通过捕获传感器信号,用户自己编写回零逻辑,封装成回零模块;第二是使用固高封装好的回零模块进行回零。很多用户使用固高封装的回零模块时经常会遇到一些问题切不知道如何解决。要顺利排查并解决问题,就要先理解回零的原理。不管是哪种方法,哪种回零方式,其本质都是通过捕获传感器触发时的编码器位置,然后以捕获到的位置作为目标位置发规划走到该位置,然后位置值清零,把该位置作为零点。下面以固高回来模块来展开说明。
1. 回零模式的选择
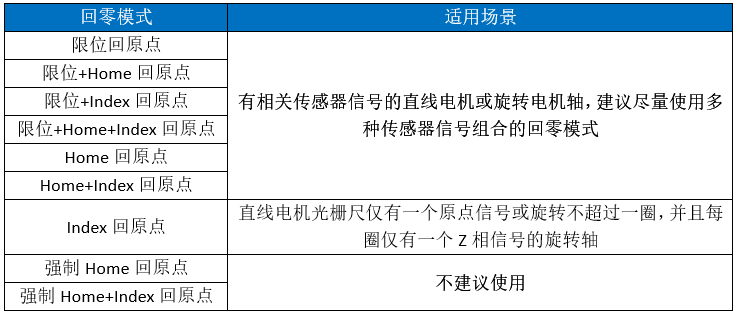
控制卡支持的回零模式有home(原点开关信号)回零、限位回零、index(编码器Z相)回零、限位+home回零、限位+index回零、限位+home+index回零等,不同的回零模式适用的场景不一样,使用时应根据实际情况选用合适的回零模式。
2. 回零常见问题
下面对固高回零模块举一些例子说明常见的各种回零异常现象,并分析造成这些现象的原因。以Home回零做说明。
2.1 重复回零回不准
对于精度要求高的场合,通常要保证回零精度,但是经常有用户回遇到重复回零发现回不准,针对这个问题,我来分析一下通常有哪些原因。
1)传感器响应慢或者电机滞后造成捕获到的位置不对
如图2-1所示,若传感器的电路响应有滞后,且电路滞后量可能是随机的,会导致捕获到的位置并不是传感器触发时的位置而导致回零不准。假设在A位置触发了传感器,由于传感器信号电路响应滞后,一直到运动到B位置时控制卡才接收到传感器信号,此时捕获到的是B点位置值,最终以捕获到的位置做为目标位置运动回到B点完成回零。
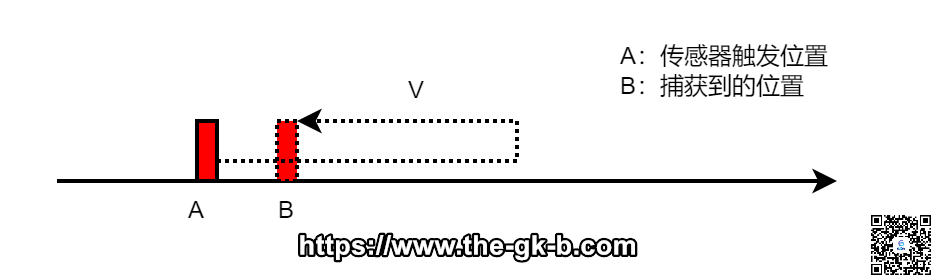
图 2-1 传感器响应滞后导致回零不准示意图
如图2-2所示,若电机存在滞后,造成传感器触发时,捕获到的编码器相对于规划有一个较大的偏差。假设在位置A触发传感器时,规划位置是pos1,由于电机滞后,编码器相对于规划有一个偏差pe,那么捕获到的编码器的值是pos1-pe,最终以pos1-pe作为目标位置运动到位置B完成回零。
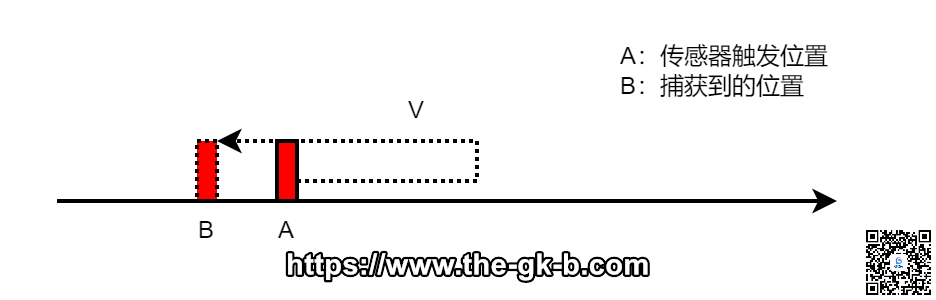
图 2-2 电机滞后回零示意图
针对传感器滞后造成的回零偏差,建议更换性能更好的传感器,并且建议尽量使用编码器Z相组合的回零模式,如限位+index、home+index等模式。因为编码器Z相信号是5V信号,信号爬升生快,电路响应也就更快,滞后量更少。对于电机滞后导致的回零不准,建议是调整伺服参数,提升性能,且回零速度尽可能低且固定。
2)回零定位速度太快造成过冲







暂无评论内容